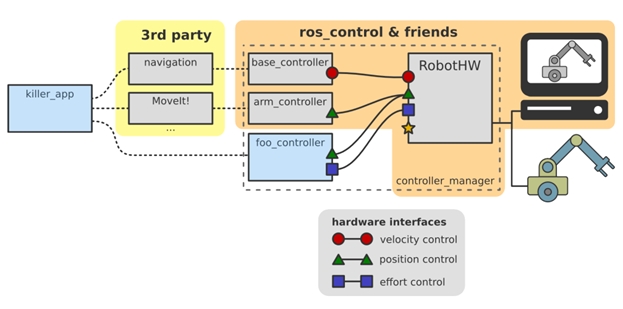
ros_control 介绍来源优势缺点基本架构简单实例 来源 ros_control 脱胎于pr2 的 硬件封装层部分 pr2_mechanism,经过pal-robotics 和 hidof 两个公司的工程师进行了改写,变得适用于所有机器人的硬件封装库,负责...
”ros_control 介绍“ 的搜索结果
以下英文链接是对于ROS control详细介绍,适用于配置自主设计的机器人,比官方wiki介绍更为详细: https://www.rosroboticslearning.com/ros-control 主要介绍以下五个内容: 1.Why Control. 2.What isROS ...
ROS控制样板简单的仿真界面和模板,用于为ros_control设置硬件界面。 想法是您以此为起点来创建您的硬件接口,这是必需的,因为很少。 该样板演示: 创建用于与ros_control一起使用的多个关节的hardware_interface ...

ros_control 请参阅上的ros_control建置状态靛青动能月球旋律理性的基于源的安装的分支ROS靛蓝ROS动力学ROS月球ROS旋律ROS Noetic 靛蓝开发动能发展动能发展旋律发展新奇发展出版物如果您认为这项工作有用,请通过...
Gazebo ros_control 接口 这是一个用于将ros_control控制器架构与模拟器集成的 ROS 包。 这个包提供了一个 Gazebo 插件,它实例化一个 ros_control 控制器管理器并将它连接到一个 Gazebo 模型。 Gazebo 的网站上...
ros_controllers 请参阅和文档建置状态靛青动能月球旋律理性的基于源的安装的分支ROS靛蓝ROS动力学ROS月球...( ) @article{ros_control,author = {Chitta, Sachin and Marder-Eppstein, Eitan and Meeussen, Wim an
摆烂才是王道



文章目录1. Controllers2.... gazebo_ros_control添加传动系统添加gazebo_ros_control插件默认gazebo_ros_control行为自定义gazebo_ros_control插件 1. Controllers sudo apt-get install ros-me
ROS HAL接口 该软件包提供了从ROS到 HAL的接口。 有望实现以下好处: 使用Machinekit RTAPI将实时控制带到ROS 在便宜的PC和ARM硬件上运行 仅通过配置即可启用设置许多机器人硬件接口,而无需编程 利用Machinekit的...
本篇的目的是想解读gazebo_ros_control 以及 gazebo_ros. 因为gazebo本身是独立于ros的,通过教程Intermediate: Control plugin以及教程Category: Write a plugin发现自己单纯的写c++ plugin就能控制model,获取...
文章目录系列文章目录前言一、ros_control目的二、ros_control架构1、控制器管理器2、控制器3、硬件抽象层4、硬件资源5、真实机器人的执行器三、ros_control的Gazebo运动控制实现流程1.gazebo 已经实现了 ros_...
ROS Gazabo仿真问题解决: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/~
9.浅谈ROS_control
标签: 线性代数

此包装的支持已结束 抱歉,要维护的东西太多了。 使用风险自负。 Baxter SSH-在Baxter内部运行 Baxter SDK的C ++版本与Rethink SDK一起使用。 这是包含Baxter控制器的ros_control实现的基本软件包...control_toolbox -b
ros_control 框架论文,概述、精炼,适合初步了解ros控制架构。
现场 rqt_graph 在一个陌生的框架下写代码,免不了有很多疑问与槽点。...不了解框架结构,千头万续,无从下手,说不清,理还乱。...ros_control是个什么东西? http://www.360doc.com/content/
用于为 ros_control 设置硬件接口的简单模拟接口和模板。这个想法是你把它作为创建硬件接口的起点,它是必要的,因为ros_control 文档很少。这个样板展示了: 为多个关节创建一个hardware_interface,以便与ros_...
Ros_control+Gazebo仿真 使用ros进行仿真的时候很多时候需要让自己的机器人动起来。所以学习了一下使用ros_control让机器人在gazebo中移动。 我首先建立了一个简单的机器人模型,这是一个四轮独立驱动的差速底盘。 ...
hardware_node参数〜control_frequency (双精度,默认值:10.0) 控制步骤的频率(从层读取,更新控制器以及写入层)以Hz为单位〜use_expected_period (bool,默认值:false) 如果为true,则在读取/写入层时,...
odrive_ros2_control\nENGLISH / 中文\n介绍\nros2_control 的 ODrive 驱动程序\n兼容性\nROS 2 狡猾的菲茨罗伊 ROS 2 谦逊的玳瑁\nODrive 固件 v0.5.3 狡猾的fw-v0.5.3 谦虚-fw-v0.5.3\nODrive 固件 v0.5.1 狡猾的...
从模板里可以看出只要对robot类进行相应的编写即可,这个类需要重写read函数、write函数、updateWD函数。继承 hardware_interface::RobotHW类,代码:odrive_diff.h中编写底盘控制指令的代码即可。...
运行 gazebo_ros_control.launch时, 错误如下: [ERROR] [1571212497.739111392, 0.166000000]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/shoulder_pitch_joint ...
对于gazebo_ros_control插件来说,transmission中重要的信息tag如下: <joint name=""> - name必须于URDF中其它地方的joint对应 <type> - transmission类型,目前仅仅实现了...

WeChangeTech ROS robot move chasssis control package ////////////////////// 通讯协议数据构成 ////////////////////// 串口波特率:115200,1停止位,8数据位,无校验 约定: 1.上位机往下位机发送的消息,功能码...
推荐文章
- Python菜鸟晋级04----raw_input() 与 input()的区别_pycharm没有raw input-程序员宅基地
- 高通AR增强现实多卡识别和扩展跟踪Unity_imagetarget扩展追踪-程序员宅基地
- 对于三星手机的手工root方法-程序员宅基地
- 2021年佛山高考成绩查询,2021年高三佛山一模,看佛山高中排名-程序员宅基地
- 删除并清空应收应付模块 期初数据_应付管理系统怎么清除数据-程序员宅基地
- 嵌入式固件加密的几种方式-程序员宅基地
- 非root情况下访问手机存储位置权限的方法_不root 通讯录 存放目录-程序员宅基地
- Mybatis项目开发流程_使用mybatis的开发步骤-程序员宅基地
- 三方协议,档案,工龄,保险,户口,-程序员宅基地
- 华为交换机命令 端口速率_华为S5700交换机的端口QOS限速问题-程序员宅基地